






Access:8
ロボット/自動運転/宇宙
センチメートル精度のGPS測位“RTK”,LiDAR/カメラ/レーダ/IMUセンサによる自己位置推定とマッピングを組み合わせたSLAM,確率統計処理によって真値を高速推定するカルマン・フィルタなど,無人搬送機開発の技術を解説します.
ZEPマガジン
 |
停止中の車が急加速!?CANになりすまし攻撃 送信エラーの累積によってノードが自己隔離する「バスオフ」は,故障耐性を目的とした規定動作.復帰には一定の条件や手続きが必要 |
 |
実車実験!車載CANへのなりすまし攻撃 送信エラーの累積によってノードが自己隔離する「バスオフ」は,故障耐性を目的とした規定動作.復帰には一定の条件や手続きが必要 |
 |
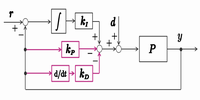
制御プログラムの良否:判定時間応答と周波数応答 P制御やPID制御を用いることで,立ち上がり特性やオーバーシュートを調整できる.パラメータ調整により,時間応答の速度と安定性をバランスさせることが可能 |
 |
姿勢を定量化する2つの物理量:加速度と角速度 M5 StampFlyで実習する場合,姿勢は加速度と角速度という2つの物理量で定量化できる |
 |
姿勢制御プログラム実装の準備:PIDの制御量を式で表す PID制御プログラムでは,比例,積分,微分の各要素を組み合わせて最終的な制御入力Uを生成し,各モータや制御軸ごとに独立して計算する |
 |
目標姿勢からのずれを3種の制御量”PID”で自動補正 マルチコプタの姿勢を安定させるには,目標姿勢からのずれを瞬時に補正する制御が不可欠であり,その基本は比例制御(P),積分制御(I),微分制御(D)である |
 |
ねらった姿勢にピタリ!フィードバック制御の導入 フィードバック制御を導入することで,ドローンの操縦者が行う操作量は少なくても安定した姿勢を維持できるようになる |
 |
上下/ロール/ピッチ/ヨー:機体の運動を自在制御 4枚のプロペラをもつクアッド・コプタは,推力の合成とトルクの制御によって機体の姿勢と位置を制御する |
 |
GPUで最新と過去のキー・フレームを丸ごと最適化 GLIMアルゴリズムは,各フレームの姿勢を不確かさをもつ変数として扱い,収束するまで一定期間継続的に最適化する |
 |
点群量の削減と形状保持:ダウン・サンプリング法 LiDARが出力する点群は1スキャンあたり50万点以上.レジストレーションやマッピング処理が非常に重いため,ダウン・サンプリングで削減する |
 |
位置・誤差・時刻の関係性を可視化&最適化 ファクタ・グラフは,ロボットや車のセンサから得られる膨大な情報と変数間の関係性をグラフで表し,全体の誤差を最小化する強力な最適化手法 |
 |
フレーム前後の点群位置を補正:高精度地図生成アルゴリズム LiDARの計測原理に起因する「点群のひずみ補正」が,SLAMの位置精度の鍵を握る |
 |
大域軌跡最適化とポーズ・グラフの実習ほか リアルタイムSLAMは,移動ロボットや自律移動システムにおいて,自身の位置を推定しつつ周囲の環境地図を同時に生成する技術 |
 |
CLAS vs RTK 測位精度比べ 数cmレベルの衛星測位技術の代表的な方式といえば「RTK(Real Time Kinematic)」と「CLAS(Centimeter Level Augmentation Service)」.両者の違いは? |
 |
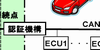
CANネットワークのパケット解析力の実習教材 Raspberry Piを使用し、ECUエミュレータに接続されたCANネットワーク上で、通信パケットの解析やなりすまし演習できる |
 |
ゼロ知識からのADAS機能解析 バスオフ攻撃は,CANバス上で特定のECUを意図的に離脱させる手法.ターゲットECUが送信したフレームを連続してエラーにすることで,エラー・カウンタを上昇させバスオフ状態に遷移 |
 |
通信内容や仕様が未公開でもデータ構造や挙動を解析する手法 ゼロ知識解析とは,通信内容や仕様が公開されていない状態でもデータの構造や挙動を解析する手法 |
 |
車載CANプロトコルの基礎とゼロ知識解析 車載LANの挙動や脆弱性を理解し,攻撃手法および防御手法の基礎を学ぶ第一歩は,ゼロ知識から始めて実車に接続し,CANメッセージの観測と解析を行うこと |
 |
F9P+D9Cで実現!CLASレシーバ RTKは軒下でもFixを維持できるのに対し,CLAS(PPP-RTK)は単独測位まで落ちる場面も多く,現場環境に応じた使いわけが求めらる |
 |
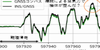
高精度測位の新たな選択肢:CLASとRTKの比較 2021年 マゼランシステムズジャパン社のCLAS対応受信機で定点,移動観測が行われた.オープン・スカイの環境下で,水平RMS 36mm,Fix率 100%という結果が得られた |
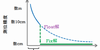 |
2つの測位解 FloatとFix RTK測位の初期段階の搬送波の波数が不明な状態で得られる測位解がFloat解.精度は数mから20cm程度.波数が判明するとFix解に到達する.精度は数cm |
 |
マルチバンドRTK 実際の製品と実力 RTK-GNSS技術の進展に伴って,cm級の測位精度が市販品でも実現されつつある.その中心はマルチバンド対応のRTK受信機 |
 |
基準点データを配信するしくみ RTK測位は,基準局の補正情報をネットワーク越し受信する.NTRIPは,RTCM形式の測位補正データをインターネット経由で配信するためのプロトコル |
 |
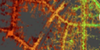
樹木下でのRTK測位の実験と精度評価 劣悪な受信環境である樹木下でRTK測位の精度の確認を実施したところ,やや大きなばらつきが確認されたが,誤差は1~2cm程度に収まっていた |
 |
NTRIPサーバが出す“RTCM”データ RTCM(Radio Technical Commission for Maritime Services)は,衛星測位システムの基準局から移動局に配信されるデータの規格 |
 |
衛星+地上基準局!一般的なRTK測位システムの構成 準天頂衛星「みちびき」が提供するCLAS(Centimeter Level Augmentation Service)は,基準局を自前で用意しなくても済む測位方式 |
 |
GNSSコンパスとIMU,それぞれの姿勢角測定特性 GNSSコンパスとIMUは,特性が異なるが補完的に用いることで高精度な姿勢角測定が可能.リアルタイム処理を行う際にはGNSSの遅延とIMUのドリフトに配慮した設計が重要 |
 |
高精度GNSSコンパス 飛行機への実装 リアルタイム処理によるGNSSコンパスの運用では,安定した通信と高いFIX率により,後処理に比べて連続性の高い測位結果が得られることを確認 |
 |
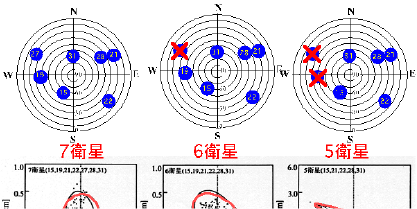
GNSS測位方式のいろいろ GNSS測位の方式は,使用するGNSS受信機の数や,観測対象が固定か移動か,さらに処理方式がリアルタイムか後処理かによって分類される |
 |
GNSSコンパスとINSによる方位角推定の比較 GNSSコンパスはINSと同等の方位角精度をもちつつ真北基準の出力も可能.GNSS由来の基線ベクトルに絶対的な意味があることを意味し,航法精度や地図基準の整合性を向上させる |
 |
移動基地局方式による飛行機搭載GNSSコンパス GNSSコンパスを飛行機に実装すると2台のアンテナ間の基線ベクトルを基に高精度な姿勢推定が可能.移動基地局方式の採用で,機体で完結した飛行中のリアルタイム姿勢測定を実現 |
 |
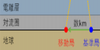
GPS衛星からの信号は光より遅い 電離層や対流圏による減速や屈折が発生するため,GPS信号は真空中の光速では到達しない.光速度不変という原理は真空中だけの話 |
 |
遠方にある基準局との間でも高いFIX率 後処理キネマティック解析では,2周波GNSSを用いることで,遠方にある基準局との間でも高いFIX率を維持できる |
 |
電離層・対流圏遅延の相殺 単独測位では移動局だけを用い,GPS衛星からの信号をもとに位置を推定するが,大きな誤差が含まれている.代表的な誤差要因は,電離層や対流圏による遅延,受信機のクロック誤差など |
 |
相対測位による誤差の相殺メカニズム 2局間の信号の違いを利用して共通の誤差成分を相殺する相対測位は,クロック,軌道,大気の誤差を打ち消すことで,cm級の精度が実現する技術 |
 |
RTKLIBによる後解析キネマティック測位 RTKLIBを用いた後解析キネマティック測位の実測で,2周波GNSSモジュールによって高いfix率とcm精度の測位が実現できることを確認 |
 |
GNSS測位の誤差要因 衛星クロック誤差や軌道誤差 GNSS測位の精度は,衛星クロックのずれに大きく左右される.誤差は補正情報である程度抑えられるが,相対測位や高精度モデルの利用により,さらなる精度向上が可能 |
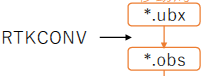 |
GNSSレシーバのデータ処理ソフト RTKLIBの活用 RTKLIBは,u-bloxなどの受信機が出力する独自バイナリ形式(*.ubx)を標準的なRINEX形式に変換する機能など,さまざまな受信データ処理用のライブラリ |
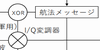 |
GNSS放送データ「航法メッセージ」の中身 GNSSの測位精度は,航法メッセージに含まれる補正係数の正確な適用によって支えられている.衛星クロックと電離層という2大誤差要因を補正することが,数m以下の測位精度を達成する鍵 |
 |
多周波対応GNSSレシーバの信号処理 多周波GNSSを活用することで,解の探索範囲が広がり,FIX解の導出が容易になる.差周波を用いて実用的なcm精度の測位が現実的となる |
 |
空力と高精度測位の両立を目指したアンテナ選定 GNSS測位の品質を決定づける基準値「搬送波対雑音比」が40dBHz以上になるように,アンテナや受信環境を整備することで,安定したRTK測位の実現が期待できる |
 |
GNSS衛星の搬送波位相で高精度測定 搬送波位相測位の鍵は,見えない「整数値バイアス」の決定.この整数がわかれば,GNSSはmm単位の精度で距離を測定できる |
 |
GNSSモジュールの実装 GNSSの信号周波数は1.2~1.6GHz程度であり,この帯域では信号線がアンテナや受信回路へと伝送される際に,インピーダンスの不整合や不要放射などの問題が発生しやすくなる |
 |
各GNSS衛星までの距離算出 GNSS測位では,複数の衛星からの信号の到達時間差を用いて位置を求める.この際に得られる擬似距離は,時刻オフセットや大気補正などを考慮して処理する |
 |
GNSSレシーバ利用の注意点 連続位相を必要とするアプリでは週またぎ時のリセット挙動を把握し,適切なGNSSモジュール選定と事前テストを行うべき |
 |
GNSS衛星までの距離算出法 GNSSコンパスの高精度化には,擬似距離の正確な取得と,搬送波位相解析によるミリm級の距離測定が鍵を握る |
 |
u-blox F9Pを2個使い!GNSSコンパスの原理と構成 u-blox ZED-F9Pを2台用いたGNSSコンパスは,高価なIMUを用いずに0.4°の高精度な方位取得が可能.正確なログ取得と適切な後処理を行えば,安定した相対位置情報が得られる |
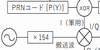 |
GPS衛星が出す電波 GPS衛星NAVSTARは,10.23MHzを基準とした複数の周波数で電波を送信し,民生用と軍用に対応した測位信号を提供している |
 |
衛星測位の原理は三角測量 GNSS測位は三角測量を基礎に,電波の伝搬時間や搬送波位相の解析により高精度な位置と方位を求める技術 |
 |
GNSSコンパスによる飛行機の姿勢角推定 ピッチ角,ロール角,ヨー角といった姿勢情報のうち,ヨー角は慣性センサでは精度確保が難しいため,GNSSによる推定が有効 |
 |
補強放送CLASチャネル“L6” CLASは基準局,つまり通信インフラ不要で災害時にも有効.収束約1分,測位精度6.9cm.一方基準局が必要なRTKは収束数~数十秒,測位精度数cm |
 |
2つの補強放送 CLASとMADOCA CLASは日本全土対象で,収束約1分,測位精度約7cm.MADOCA-PPPは,アジア・オセアニア対象で,収束15~30分,測位精度10cm |
 |
位置補正信号を放送中 準天頂衛星QZSSとは 準天頂衛星システムQZSSは,日本国内で高精度な測位サービスを提供する衛星測位インフラ.CLASはその補正信号を活用し,高精度な単独測位を実現する |
 |
RTKからMADOCAまで衛星測位方式の整理 衛星測位技術は単独測位と相対測位に分類される.CLASはみちびき衛星による補正信号を活用した単独測位方式で,日本国内でcm級の精度を実現する |
 |
ROS×ラズパイ SLAMロボット入門 ROSの複数のアプリを自動で起動するLaunchファイルを用意して複数のノードをまとめて起動することで,SLAMロボットは短時間で地図作成や自己推定を開始できる |
 |
ラズパイ×ROS SLAMロボット開発 ロボット開発用ミドルウェアROSを実装したラズベリー・パイ・ホストで,Wi-Fiマイコンを搭載したクライアント・ローバからIMUセンサ情報をリモート受信 |
 |
初めてのラズパイ×ROS SLAMロボット開発 Gmappingはパーティクル・フィルタを用いたSLAMアルゴリズムを実装し,地図をリアルタイムに生成する.位置や姿勢の仮説の1つ「パーティクル」の数を増すことで推定精度が上がる |
 |
MATLAB/Simulink入門 ADCを読んでLED制御 Simulinkは,図形ブロックを操作することで,複雑な制御器や信号処理システムを直感的に作成できる.ラズパイに外付けしたA-Dコンバータを動かしてLEDの輝度を制御してみた |
 |
MATLAB/Simulink入門 なぜ,MATLABなのか MATLABは米MathWorks社が開発した数値解析ソフトウェア.複雑な行列演算を数行のコードで記述できる.ロボティクスからソフトウェア無線まで,制御や信号処理アルゴリズム開発に欠かせない |
 |
ライン・トレース・ロボットの目を作る 赤外線を放ち反射光の強度を測定するライン・センサを使うと白黒のパターンを識別できる.計測値に環境光やノイズが含まれる場合は,移動平均を用いた信号処理が有効 |
 |
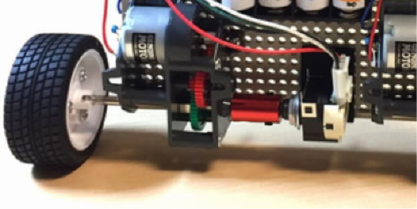
誤差の多いBang Bang制御の誤差を改善 ライン・トレーサの直進性は,左右モータの個体差や床面摩擦,ギアの組立て精度など,多くの誤差要因によって損なわれる.Bang-Bang制御とPID制御の補償性能を比べてみた |
 |
ドローン制御工学入門 M5Stamp Flyの傾き角推定 角度推定は,ノイズが多い加速度センサとドリフトが蓄積しやすい角速度センサの2つから取得した情報を組み合わせて行う.鍵はカルマン・フィルタの軽量版「マドウイック・フィルタ」 |
 |
安全性goodな制御工学教材!M5Stamp Flyドローン誕生 M5Stamp Flyは,教育現場での利用を考慮し,プロペラに指を入れても安全な構造を採用している.Wi-FiやBluetooth通信にも対応し,ESPNowプロトコルを用いたリモート・コントロールが可能 |
 |
センチメートルRTK測位入門3 高感度アクティブ・アンテナ GNSS衛星と地上の距離は約2万km.衛星の電波のレベルは地上で-130~-160dBm程度と言われている.cm級のリアルタイムな高精度測位を実現するかぎはアンテナが握っている |
 |
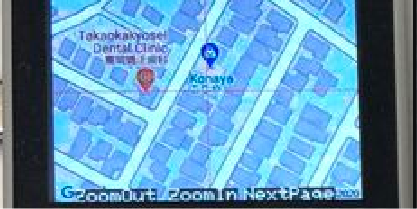
NMEA単独測位の実機デモンストレーション RTK測位は,高精度な位置情報を提供するセンチ・メートル単位での精度を実現する技術.入門キット「M5F9P」を使って基準局および移動局を設定しデータを保存するまでの手順を解説 |
 |
ファームの書き込みと実機デモンストレーション M5F9Pは,マイコン・キット M5Stackとu-blox製のZED-F9Pモジュールを中心としたRTK GNSS測位用スタータキット.バッテリ搭載でフィールドでのセンチメートル精度測位が可能 |
 |
3次元LiDARとIMUを用いたSLAM/位置推定 自己位置推定とマップ生成技術“SLAM”は,現代の自律ロボットや自動運転車の開発に欠かせない.鍵を握るのは3次元LiDARとIMU,そして測定情報を処理する数学と実装技術 |
 |
軒下でも安定測位 2周波RTK GNSSによるcm測位 u-blox社のZED-F9Pは2周波のRTK測位に対応したマルチバンドGNSSレシーバ.2周波の衛星電波を利用して,軒下などでも安定したセンチ・メートル級の高精度測位が可能 |
 |
M5Stamp Flyドローンの姿勢ブレを軽減する2つのセンサ ドローンの垂直のブレは近距離での高精度な測距が可能なToFが,水平のブレは物体の動きによって生じる画像の「流れ」を計測するオプティカル・フロー・センサが有効 |
 |
IMUで補完!カルマン・フィルタによる高精度GNSS測位 衛星電波で測位するGPS/GNSSは,トンネルや高架下では信号が届かず,測位できない課題がある.加速度や角速度を計測するIMUで補完することで 連続した自己位置推定が可能になる |
 |
方位精度0.4°!cm測位!高精度GNSSコンパス開発 2台以上のアンテナで方位角や姿勢角を測るGNSSコンパスと,ジャイロや加速度センサで位置や姿勢を計算するINSの組み合わせは,時間累積する誤差を解決する有効な手段 |
 |
$50ドローン・キット“M5Stamp Fly”の制御プログラミング M5Stamp Flyは,C/C++言語でプログラミング可能な50ドルのドローン・キット.APIがオープンソースとして提供されており飛行制御プログラムの作成や学習が可能 |
 |
SLAMロボット入門 部屋の形をLiDAR計測 SLAMはLiDARやIMUを使って地図を作り,自分の位置を推定する技術.ラズベリー・パイとESP32マイコンを使って,環境変化に柔軟に適応するROS搭載SLAMロボットを自作 |
 |
多関節アームの操作に!状態フィードバック制御入門 状態フィードバック制御は,外乱やモデルの不確かさに対するロバスト性が重視されるロボット・アームの位置制御や車両の速度制御に応用されています |
 |
ロボティクス入門 現実にモデルを近付ける ロバストな制御システムは,実際の制御対象と理想との差分「不確かさ」に対応したモデルを用意して,モデルベース開発を行うことで設計できます |
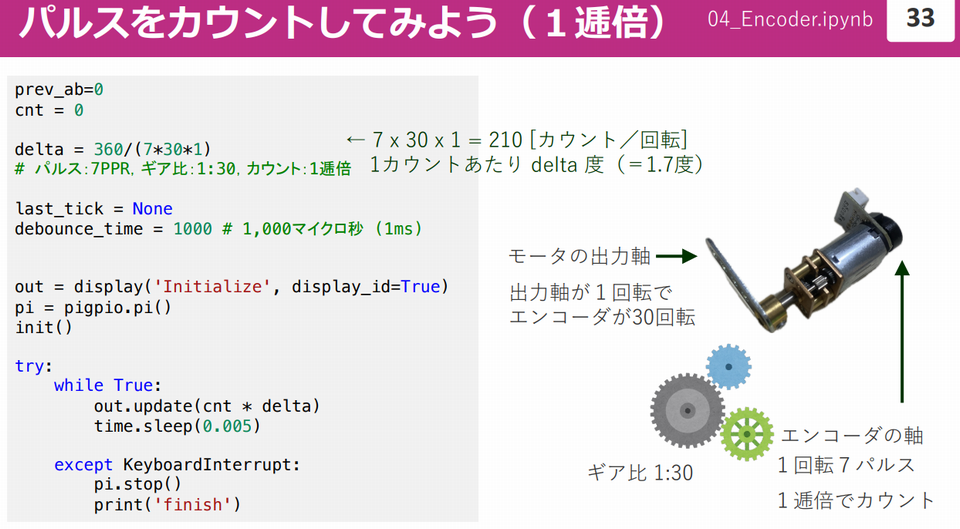 |
ロボティクス入門 エンコーダで回転を測る エンコーダは,回転運動の位置,角度,速度を正確に計測するために不可欠なセンサです.「光学式エンコーダ」を例に,その構造と測定メカニズムを解説します |
 |
ロバスト制御のモデリング 実物との差分の表現 システムの不確かさに対して頑健な制御系の設計を目指すのがロバスト制御です.不確かさは,パラメータの変動や外乱など,制御対象が完全に予測できない要素を含みます |
 |
センチ・メートル測位技術”RTK”の始め方 RTKは,基準局と移動局の2つのGNSS受信機を使用してリアルタイムで相対位置を測定する技術,cm級の超高精度測位が可能だ |
 |
宇宙ロケットの高セキュア&エラー・レス通信技術 ロケットに異常が発生したときの指示と判断のため,信頼性の高い無線通信が極めて重要である.サイバ攻撃やノイズに強いMAC(メッセージ認証コード)のしくみを解説 |
 |
宇宙軌道ロケット 成功の方程式 ロケットの飛行には科学的な計算と理論が必要である.動画ではロケットの性能を評価するために不可欠な方程式「ツォルコフスキーの式」の中の噴出速度に焦点を当てて解説 |
 |
LiDAR×ROSで作る地図作成ロボット 掃除,配膳,警備…人に代わって働く自律ロボットには“SLAM”と呼ぶ自己位置推定と地図作成の技術が利用されている.第1回は、自作のSLAMロボットのあらましを解説する |
VOD教材 [視聴無制限]





キット&モジュール
 |
[VOD/KIT/data]M5Stamp Flyで学ぶ ドローン制御プログラミング入門 ジャイロ・センサ活用からループ整形によるPID設計・チューニング,安定飛行まで |
 |
[VOD/KIT/data]Jetson Nanoキットで学ぶ NVIDIA CUDAプログラミング入門 GPUのしくみから並列処理の実装,画像処理,AI応用まで |
 |
[VOD/KIT]RTKポータブル・センチメートル測位キット 無人搬送ロボット,車いす,盲人誘導,ドローン,3次元計測に |