




Access:181
ZEPマガジン
 |
2025年12月29日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
微分方程式→伝達関数→状態方程式:動的システムのモデリング 微分方程式のままでは,時間領域での変化を追う必要があり,応答の特徴を直感的に比較しにくいため,別の表現へ変換する手順が使われる |
 |
2025年12月28日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
過去入力から出力が決まる動的システムを制御する 現在の出力が,現在の入力だけでなく,過去の入力や状態の履歴に依存するシステム.この性質があるため,動的システムは「記憶」をもつシステムとして整理される |
 |
2025年12月27日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
最適設計も安定余裕も可制御性も,モデリング&シミュレーション設計 制御設計では,対象の動きや応答を把握しないまま調整を進めると,結果が設計者の経験に依存するが,モデリングを行えば対象の性質を共通の枠組みで議論できる |
 |
2025年12月26日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
脱試行錯誤!フィードバック制御の最適化は体系的アプローチで フィードバック制御では,ゲイン$K$を大きくすると応答は速くなるが,振動や行き過ぎが現れる.速さと振動は同時によくならない関係にある |
 |
2025年12月25日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
フィードバック制御のメリット:目標値追従/外乱抑制/安定化 フィードバック制御では,観測できる量が制御性能を左右する.回転角度を直接使う場合もあれば,角速度の情報を併用する場合もある |
 |
2025年12月24日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
角速度はシンプル制御:角度はフィードバック制御 角速度がずれると,「角度」のずれは時間とともに増えるため,角度の制御では,現在の角度がどこにあるかを見て,入力を変え続ける必要がある |
 |
2025年12月23日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
温度/回転から電力まで:「制御」の定義と応用 制御では,対象,状態,目標,操作が明確に区別される.対象はロボットや装置.状態は姿勢,速度,温度など.目標は望ましい値.操作は入力として与える物理量 |
 |
2025年12月22日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
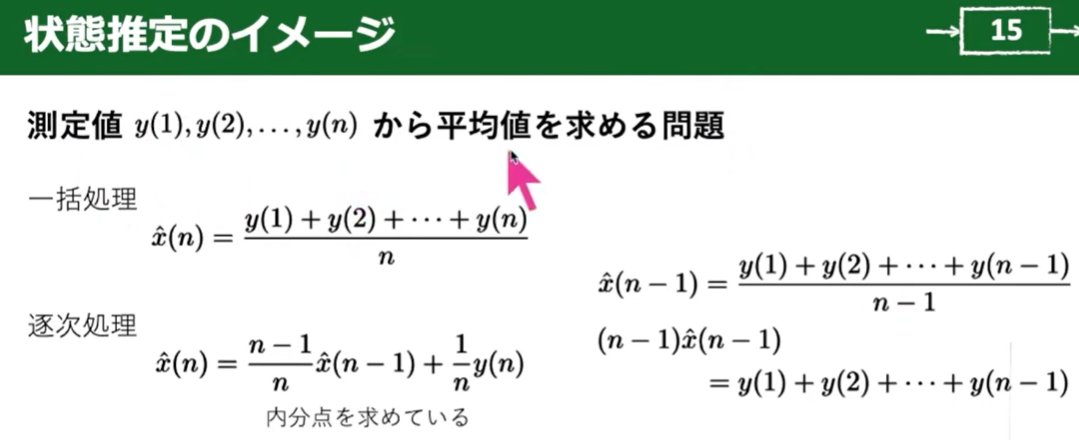
状態推定の第1歩:逐次計算による平均値計算 平均値は観測値をそのまま採用するのではなく,複数サンプルを統合して1つの値にまとめる処理.この方法がオブザーバやカルマン・フィルタにつながる |
 |
2025年12月21日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
計測点以外の量「状態」を推量るオブザーバとカルマン・フィルタ 現実のシステムでは,すべての状態をセンサで観測できるわけではない.観測できない状態を,モデルと計測から推定して扱うのが状態推定 |
 |
2025年12月20日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
[シミュレータ/ツール]
最新PSOCでタッチ・アプリケーション開発入門 PSOC4000T評価ボードと3種類の拡張ボード(ホバー・タッチ,誘導式キー・パッド,液面センサ)を使い,リアルタイムで感度やしきい値を調整する方法を紹介 |
人気のZEPマガジン
ZEPマガジン総アクセス数: 291,039
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (53,983 views)
- Pythonではじめる 数値解析入門 (19,681 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (12,647 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (7,688 views)
- GNU Radio×USRPで作るソフトウェア無線機 (6,722 views)
- スペアナ入門 RBWとVBW (5,095 views)
- OPアンプ増幅回路の2つのゲイン (4,511 views)
- 高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 (3,896 views)
- 故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 (3,798 views)
- 大規模言語モデルLLM入門 その3 モデルの簡易化「蒸留」 (3,300 views)