




Access:212
ZEPマガジン
 |
2025年5月23日号 [ロボット/自動運転/宇宙]
空力と高精度測位の両立を目指したアンテナ選定 GNSS測位の品質を決定づける基準値「搬送波対雑音比」が40dBHz以上になるように,アンテナや受信環境を整備することで,安定したRTK測位の実現が期待できる |
 |
2025年5月22日号 [ロボット/自動運転/宇宙]
GNSS衛星の搬送波位相で高精度測定 搬送波位相測位の鍵は,見えない「整数値バイアス」の決定.この整数がわかれば,GNSSはmm単位の精度で距離を測定できる |
 |
2025年5月21日号 [ロボット/自動運転/宇宙]
GNSSモジュールの実装 GNSSの信号周波数は1.2~1.6GHz程度であり,この帯域では信号線がアンテナや受信回路へと伝送される際に,インピーダンスの不整合や不要放射などの問題が発生しやすくなる |
 |
2025年5月20日号 [ロボット/自動運転/宇宙]
各GNSS衛星までの距離算出 GNSS測位では,複数の衛星からの信号の到達時間差を用いて位置を求める.この際に得られる擬似距離は,時刻オフセットや大気補正などを考慮して処理する |
 |
2025年5月19日号 [ロボット/自動運転/宇宙]
GNSSレシーバ利用の注意点 連続位相を必要とするアプリでは週またぎ時のリセット挙動を把握し,適切なGNSSモジュール選定と事前テストを行うべき |
 |
2025年5月18日号 [ロボット/自動運転/宇宙]
GNSS衛星までの距離算出法 GNSSコンパスの高精度化には,擬似距離の正確な取得と,搬送波位相解析によるミリm級の距離測定が鍵を握る |
 |
2025年5月17日号 [ロボット/自動運転/宇宙]
u-blox F9Pを2個使い!GNSSコンパスの原理と構成 u-blox ZED-F9Pを2台用いたGNSSコンパスは,高価なIMUを用いずに0.4°の高精度な方位取得が可能.正確なログ取得と適切な後処理を行えば,安定した相対位置情報が得られる |
 |
2025年5月16日号 [ロボット/自動運転/宇宙]
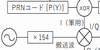
GPS衛星が出す電波 GPS衛星NAVSTARは,10.23MHzを基準とした複数の周波数で電波を送信し,民生用と軍用に対応した測位信号を提供している |
 |
2025年5月15日号 [ロボット/自動運転/宇宙]
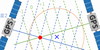
衛星測位の原理は三角測量 GNSS測位は三角測量を基礎に,電波の伝搬時間や搬送波位相の解析により高精度な位置と方位を求める技術 |
 |
2025年5月14日号 [ロボット/自動運転/宇宙]
GNSSコンパスによる飛行機の姿勢角推定 ピッチ角,ロール角,ヨー角といった姿勢情報のうち,ヨー角は慣性センサでは精度確保が難しいため,GNSSによる推定が有効 |
人気のZEPマガジン
ZEPマガジン総アクセス数: 291,188
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (53,984 views)
- Pythonではじめる 数値解析入門 (19,682 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (12,647 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (7,688 views)
- GNU Radio×USRPで作るソフトウェア無線機 (6,722 views)
- スペアナ入門 RBWとVBW (5,095 views)
- OPアンプ増幅回路の2つのゲイン (4,511 views)
- 高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 (3,897 views)
- 故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 (3,798 views)
- 大規模言語モデルLLM入門 その3 モデルの簡易化「蒸留」 (3,300 views)