




Access:217
ZEPマガジン
 |
2025年3月24日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
8bit PICで10分!ミニUSB I/Oデバイスの制作 EUSARTの設定項目を適切に選択することで,安定したUSBシリアル通信を実現できる.ボーレートは安定性と互換性のバランスを考慮して設定する |
 |
2025年3月23日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
8bit PICで10分!ミニ音源の制作 NCOを用いた矩形波生成では,インクリメント・レジスタを適切に設定することで,正確な周波数のパルスを出力できる.ポイントは,クロック・ソースの選択と分周比の計算 |
 |
2025年3月22日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
モータ制御器の定量設計 目標値達成のための3変数 P制御とD制御を適切に組み合わせることで,応答速度と安定性のバランスの取れたモータ制御が可能.さらにI制御を加えれば,定常偏差を補正できる |
 |
2025年3月21日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
エンコーダの2相パルスを読取る Pythonプログラム エンコーダの2つのパルス信号(A相とB相)の位相ずれを検出すれば回転方向を判定できる.A相,B相の両方の立ち上がりと立ち下がりをカウントすれば,計測分解能が4倍に上がる |
 |
2025年3月20日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
モータ制御器の定量設計 手もちモータを式で表す 伝達関数モデルや状態空間モデルを活用して,慣性や粘性摩擦を考慮することで,より精密なモータのモデリングが可能 |
 |
2025年3月19日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
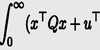
状態フィードバックの安定化 極配置法と最適レギュレータ法 極配置法を用いることで,指定した固有値に応じた応答が得られる.最適レギュレータ法では,評価関数を最小化することで最適な制御ゲインを決定する |
 |
2025年3月18日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
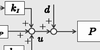
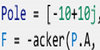
Ackermann関数による極配置と帰還ゲインの設定 モータ制御器の安定性や応答特性の両立には,制御対象の行列$A$と入力行列$B$を用いて特定の極を設定し,状態フィードバック・ゲイン$F$を求める極配置法が有効 |
 |
2025年3月17日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
制定速度とオーバシュートのパラメータ設定 バターワース標準形や極配置を適切に設定することで,モータ制御器のオーバシュートを抑え,応答速度を最適化できる.I-PD制御では$K_p$/$K_d$/$K_i$が重要 |
 |
2025年3月16日号 [AI/IoT/マイコン]
[Python/Linux/OS]
ラズパイで作るAI OCR 手書きの文字を読む ディープラーニングの学習には,誤差関数や最適化アルゴリズムが重要な役割を果たす.活性化関数や学習率の調整によって,モデルの精度が大きく変わる |
 |
2025年3月15日号 [AI/IoT/マイコン]
[Python/Linux/OS]
ニューラル・ネットワークの軽量化と推定精度の維持 エッジAIデバイス用のCPUは,計算リソースと消費電力の制約が厳しく,ニューラル・ネットワークの軽量化と精度の両立が必須 |
人気のZEPマガジン
ZEPマガジン総アクセス数: 291,188
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (53,984 views)
- Pythonではじめる 数値解析入門 (19,682 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (12,647 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (7,688 views)
- GNU Radio×USRPで作るソフトウェア無線機 (6,722 views)
- スペアナ入門 RBWとVBW (5,095 views)
- OPアンプ増幅回路の2つのゲイン (4,511 views)
- 高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 (3,897 views)
- 故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 (3,798 views)
- 大規模言語モデルLLM入門 その3 モデルの簡易化「蒸留」 (3,300 views)