




Access:186
ZEPマガジン
 |
2024年9月28日号 [基板/実装/3Dプリンタ]
[シミュレータ/ツール]
リフロ?手はんだ?フットプリントの作成術 部品のはんだ付けの方法には自動機またははんだこての2つ選択肢があり,各々に適したフットプリントを設計することが重要.0.5mm以上のパッドの露出部分を確保したい |
 |
2024年9月27日号 [基板/実装/3Dプリンタ]
[高速データ伝送/USB]
[ノイズ/放熱対策]
そのシールド要る?コネクタの効果的EMC コネクタにおける差動信号と同相信号によるノイズの放射は,シールドの有無で大きく違います.この効果の違いをシミュレーション実験で確認します |
 |
2024年9月26日号 [基板/実装/3Dプリンタ]
[高速データ伝送/USB]
[ノイズ/放熱対策]
クロストーク最小化 AIでスピード基板設計 クロストークは,隣接する回路の信号が干渉し合う現象で,差動信号を扱うときの重要課題です.機械学習を活用してこのクロストークが最小になる基板設計技術に注目です |
 |
2024年9月25日号 [FPGA/HDL/論理回路]
[AI/IoT/マイコン]
[半導体/電子部品]
ラズパイで入門!自作RISC-VのC/C++開発環境 ラズベリー・パイやUbuntuの利用を前提に,無料の命令セット・アーキテクチャ“RISC-V”のプログラミング開発環境のセットアップ方法を解説します |
 |
2024年9月24日号 [FPGA/HDL/論理回路]
[AI/IoT/マイコン]
[半導体/電子部品]
自作RISC-V パイプラインCPUの設計 RISC-Vプロセッサの重要な機能の1つが,効率的なメモリ・アクセス制御です.特に,ロード命令の処理には複数のステージが関わり,これにより命令のパイプラインが適切に動作します |
 |
2024年9月23日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
多関節アームの操作に!状態フィードバック制御入門 状態フィードバック制御は,外乱やモデルの不確かさに対するロバスト性が重視されるロボット・アームの位置制御や車両の速度制御に応用されています |
 |
2024年9月22日号 [アナログ/センサ/計測]
[基板/実装/3Dプリンタ]
アンプ? or トランス? シングルエンド-差動変換 A-D/D-A変換の入出力や電流計測など,微小な信号の伝送や増幅には,低ひずみ,高S/Nなどメリットの多い差動信号を利用します |
 |
2024年9月21日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
ロボティクス入門 現実にモデルを近付ける ロバストな制御システムは,実際の制御対象と理想との差分「不確かさ」に対応したモデルを用意して,モデルベース開発を行うことで設計できます |
 |
2024年9月20日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
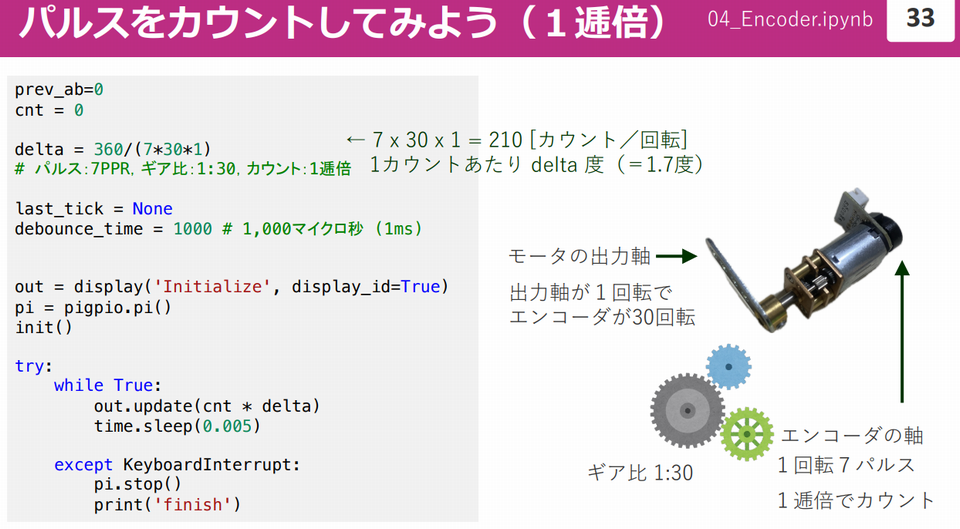
ロボティクス入門 エンコーダで回転を測る エンコーダは,回転運動の位置,角度,速度を正確に計測するために不可欠なセンサです.「光学式エンコーダ」を例に,その構造と測定メカニズムを解説します |
 |
2024年9月19日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
ロバスト制御のモデリング 実物との差分の表現 システムの不確かさに対して頑健な制御系の設計を目指すのがロバスト制御です.不確かさは,パラメータの変動や外乱など,制御対象が完全に予測できない要素を含みます |
人気のZEPマガジン
ZEPマガジン総アクセス数: 291,188
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (53,984 views)
- Pythonではじめる 数値解析入門 (19,682 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (12,647 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (7,688 views)
- GNU Radio×USRPで作るソフトウェア無線機 (6,722 views)
- スペアナ入門 RBWとVBW (5,095 views)
- OPアンプ増幅回路の2つのゲイン (4,511 views)
- 高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 (3,897 views)
- 故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 (3,798 views)
- 大規模言語モデルLLM入門 その3 モデルの簡易化「蒸留」 (3,300 views)