




Access:179
ZEPマガジン
 |
2025年11月19日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
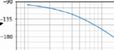
制御プログラムの良否:判定時間応答と周波数応答 P制御やPID制御を用いることで,立ち上がり特性やオーバーシュートを調整できる.パラメータ調整により,時間応答の速度と安定性をバランスさせることが可能 |
 |
2025年11月18日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
姿勢を定量化する2つの物理量:加速度と角速度 M5 StampFlyで実習する場合,姿勢は加速度と角速度という2つの物理量で定量化できる |
 |
2025年11月17日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
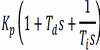
姿勢制御プログラム実装の準備:PIDの制御量を式で表す PID制御プログラムでは,比例,積分,微分の各要素を組み合わせて最終的な制御入力Uを生成し,各モータや制御軸ごとに独立して計算する |
 |
2025年11月16日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
目標姿勢からのずれを3種の制御量”PID”で自動補正 マルチコプタの姿勢を安定させるには,目標姿勢からのずれを瞬時に補正する制御が不可欠であり,その基本は比例制御(P),積分制御(I),微分制御(D)である |
 |
2025年11月15日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
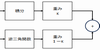
ねらった姿勢にピタリ!フィードバック制御の導入 フィードバック制御を導入することで,ドローンの操縦者が行う操作量は少なくても安定した姿勢を維持できるようになる |
 |
2025年11月14日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
[ロボット/自動運転/宇宙]
上下/ロール/ピッチ/ヨー:機体の運動を自在制御 4枚のプロペラをもつクアッド・コプタは,推力の合成とトルクの制御によって機体の姿勢と位置を制御する |
 |
2025年11月13日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
コーディングと可視化:ブラウザIDE Jupiter LAb ラズベリー・パイにはPythonとJupyter Labがあらかじめ導入されている.Jupyter Labはブラウザ上で動作する統合開発環境で,コードの編集・実行・結果の可視化を同一画面で行える |
 |
2025年11月12日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
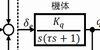
制御器設計の第1歩!モータの数式化から始める 電気的および機械的なエネルギ変換を行う直流モータの動作は,2階の微分方程式で表すことができる |
 |
2025年11月11日号 [制御/モデルベース設計]
[モータ/アクチュエータ]
制御工学計算ライブラリPython Controlのススメ Python-Controlは制御工学の計算やシミュレーションをPython上で実行できるライブラリ.時間応答の可視化,ステップ応答や周波数応答の計算,安定余裕の評価などが行える |
 |
2025年11月10日号 [アナログ/センサ/計測]
[AI/IoT/マイコン]
[半導体/電子部品]
実際の電子製品のプリント基板 プリント基板(Printed Circuit Board : PCB)は,電子回路を構成する配線パターンが形成された板 |
人気のZEPマガジン
ZEPマガジン総アクセス数: 291,000
- ラズベリー・パイ Picoマイコン入門 C言語開発環境の構築 (53,983 views)
- Pythonではじめる 数値解析入門 (19,679 views)
- 無帰還純A級オールディスクリート・ヘッドホン・パワーアンプの製作 (12,647 views)
- 最新研究 Raspberry Pi 4のGPUプログラミング (7,688 views)
- GNU Radio×USRPで作るソフトウェア無線機 (6,722 views)
- スペアナ入門 RBWとVBW (5,095 views)
- OPアンプ増幅回路の2つのゲイン (4,511 views)
- 高感度受信!ソフトウェア無線機の心臓部“Root-Raised Cosine Filter”の設計 (3,896 views)
- 故障推定から画像認識まで!「主成分分析」による最高性能AIエッジ開発 (3,798 views)
- 大規模言語モデルLLM入門 その3 モデルの簡易化「蒸留」 (3,300 views)